Когда инженеры Федеральной политехнической школы Лозанны (EPFL) в Швейцарии переосмыслили концепцию «руки», они сознательно отказались от одной из самых фундаментальных установок: кисть должна быть зафиксирована на руке. Они разработали роботизированную руку, которая может отделяться от роботизированной руки, ползать по поверхности, как маленькое существо, а также приближаться и захватывать объекты практически с любого направления, предоставляя новый рабочий инструмент для будущих задач промышленного контроля и технического обслуживания.
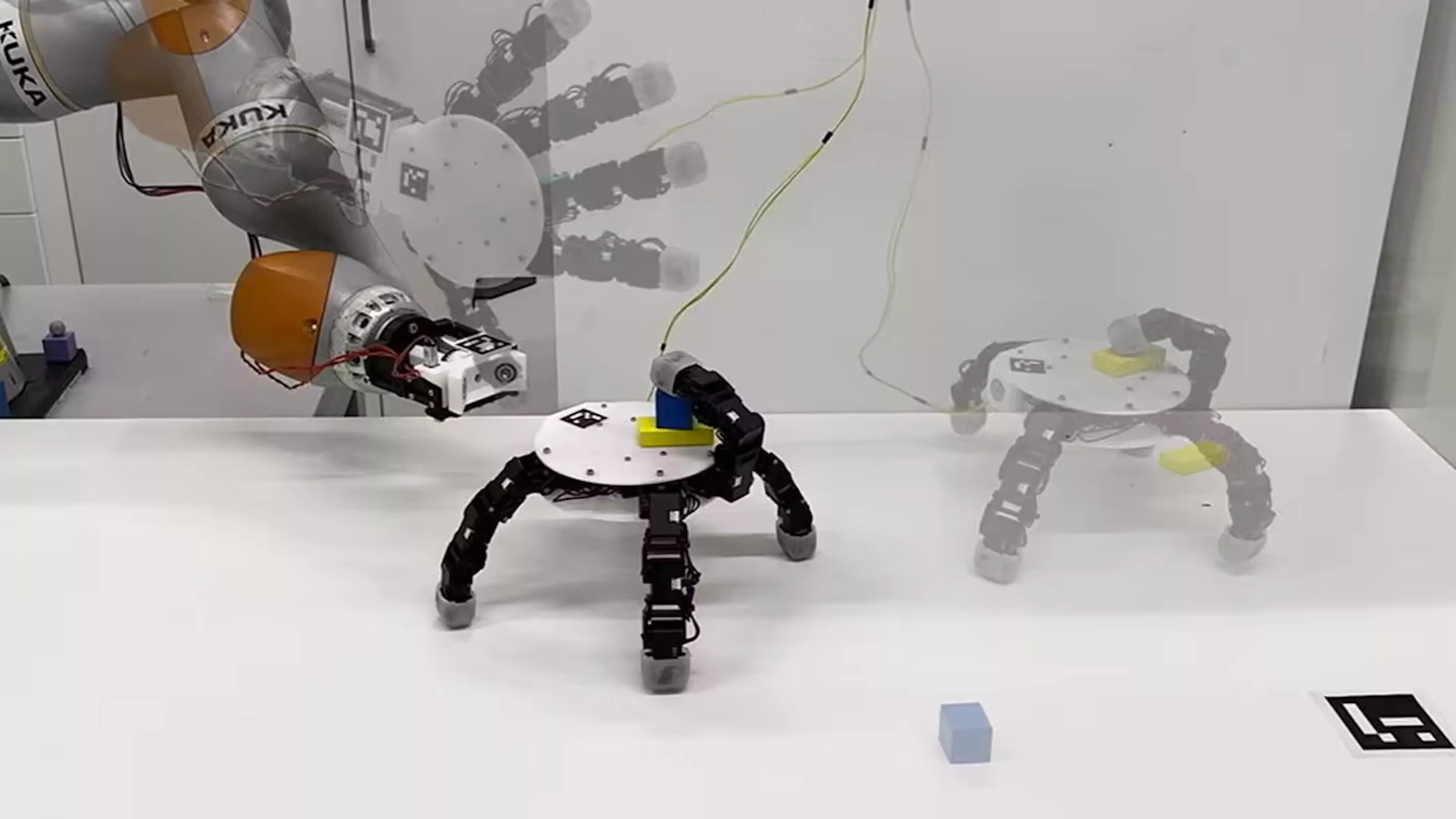
В отличие от традиционных манипуляторов, которые крепятся к концу роботизированной руки, это новое устройство представляет собой «двухрежимный» манипулятор: его можно использовать как обычный концевой эффектор или оно может двигаться независимо после разблокировки от роботизированной руки. После отсоединения он полагается на скоординированные движения между пальцами, чтобы ползать, поворачиваться и перемещаться в разных направлениях, чтобы активно приближаться к целевому объекту. Этот дизайн в определенной степени стирает границы между «конечностями» и «мобильными машинами» и рассматривается исследовательской группой как прагматичная эволюция формы робота, а не как концепция научной фантастики.
Проект возглавляет Гао Сяо, который проводил исследования в EPFL, а сейчас работает в Уханьском университете. Он рассказал Financial Times, что цель команды — расширить границы того, что «руки» — биологические или механические — могут делать в оперативных задачах. В отличие от человеческих рук, в которых один большой палец противостоит остальным пальцам, каждый палец этой руки робота может образовывать оппозицию с любым другим пальцем. Такая структура противопальцев дает системе гораздо большую гибкость, чем человеческая рука, позволяя ей переключаться между различными комбинациями пальцев для точного манипулирования целями различными способами, такими как сжимание, зажим или подъем.
С точки зрения структурных инноваций, эта рука также обладает способностью «хватать в обоих направлениях, спереди и сзади», чего нет у человеческих рук. Пальцы человека физиологически неспособны эффективно захватывать предметы с тыльной стороны ладони, но эта система может стабильно удерживать предметы как в переднем, так и в заднем направлении. Это не только позволяет захватывать несколько объектов одновременно, но и открывает возможности для «многозадачности одной рукой» при манипулировании инструментами и целями.
В ходе экспериментальной демонстрации эта рука робота выполнила ряд рабочих задач, которые обычно требуют сотрудничества двух человеческих рук, например, отвинчивание крышки бутылки при фиксации корпуса бутылки или приложение крутящего момента с помощью другого инструмента при стабилизации заготовки. Гибко планируя противоположные комбинации разных пальцев, он может имитировать или даже превосходить некоторые режимы работы в традиционных сценариях совместной работы двумя руками.
Гао Сяо подчеркнул, что отправной точкой разработки команды был «функциональный контроль», а не цели скрытности или наблюдения. Исследователи полагают, что наиболее потенциальные сценарии его применения находятся на передовой линии промышленности: проверка состояния внутри трубопроводов или оборудования, разборка и сборка деталей для обслуживания или извлечение упавших заготовок в узких пространствах. В этих приложениях традиционные полностью роботизированные руки или люди-операторы часто не могут проникнуть на объект, в то время как небольшие, независимые мобильные «ползающие руки» могут получить доступ и управлять труднодоступными местами.
Исследовательская группа предполагает, что будущие роботизированные системы смогут сочетать мобильные платформы с такими съемными роботизированными руками. Мобильная платформа отвечает за проверку оборудования и доступ к нему на сложных объектах, в то время как рука робота при необходимости отделяется от платформы или роботизированной руки и уходит вглубь узких пространств для выполнения таких задач, как уборка мусора, управление клапанами или захват оборудования. Ожидается, что такая структура разделения труда и сотрудничества улучшит адаптивность и скорость выполнения задач систем промышленной автоматизации в сложных средах.
Эта работа также привлекла внимание сообщества робототехники. Дигби Чаппелл, доцент Института робототехники Оксфордского университета, отметил, что эта роботизированная рука «интересна и провокационна» и имеет поучительное значение в таких областях, как промышленная автоматизация и исследования в области протезирования. Он отметил, что, хотя скорость ползания прототипа в настоящее время не очень высока, его способность достигать синергии между «движением и хватанием» уже переопределяет возможную форму «роботизированных рук».
В настоящее время эта «ползающая рука» все еще находится на стадии лабораторного прототипа. Однако она явно показала совершенно иной путь, чем имитация анатомии человека: следующий шаг робототехники, возможно, больше не будет ограничиваться «подобием людей», а будет развиваться в более адаптируемом, многоцелевом и модульном направлении, ориентированном на промышленные и практические нужды.