В ходе последнего новаторского исследования группа ученых разработала новый тип электронной кожи, которая позволяет роботам-гуманоидам различать ежедневные прикосновения и потенциально разрушительные внешние силы. Ожидается, что эта способность, которая изначально принадлежала только биологической нервной системе, изменит способ взаимодействия роботов с физическим миром, особенно с людьми.
Исследование было недавно опубликовано в Трудах Национальной академии наук (PNAS) и было завершено совместно исследователями из Технического университета Мюнхена и партнерских учреждений. Основная цель состоит в том, чтобы создать более надежный механизм восприятия боли для роботов, чтобы он мог идентифицировать вредные контакты и соответствующим образом вызывать защитные реакции, а не просто оставаться на простом уровне обнаружения давления.
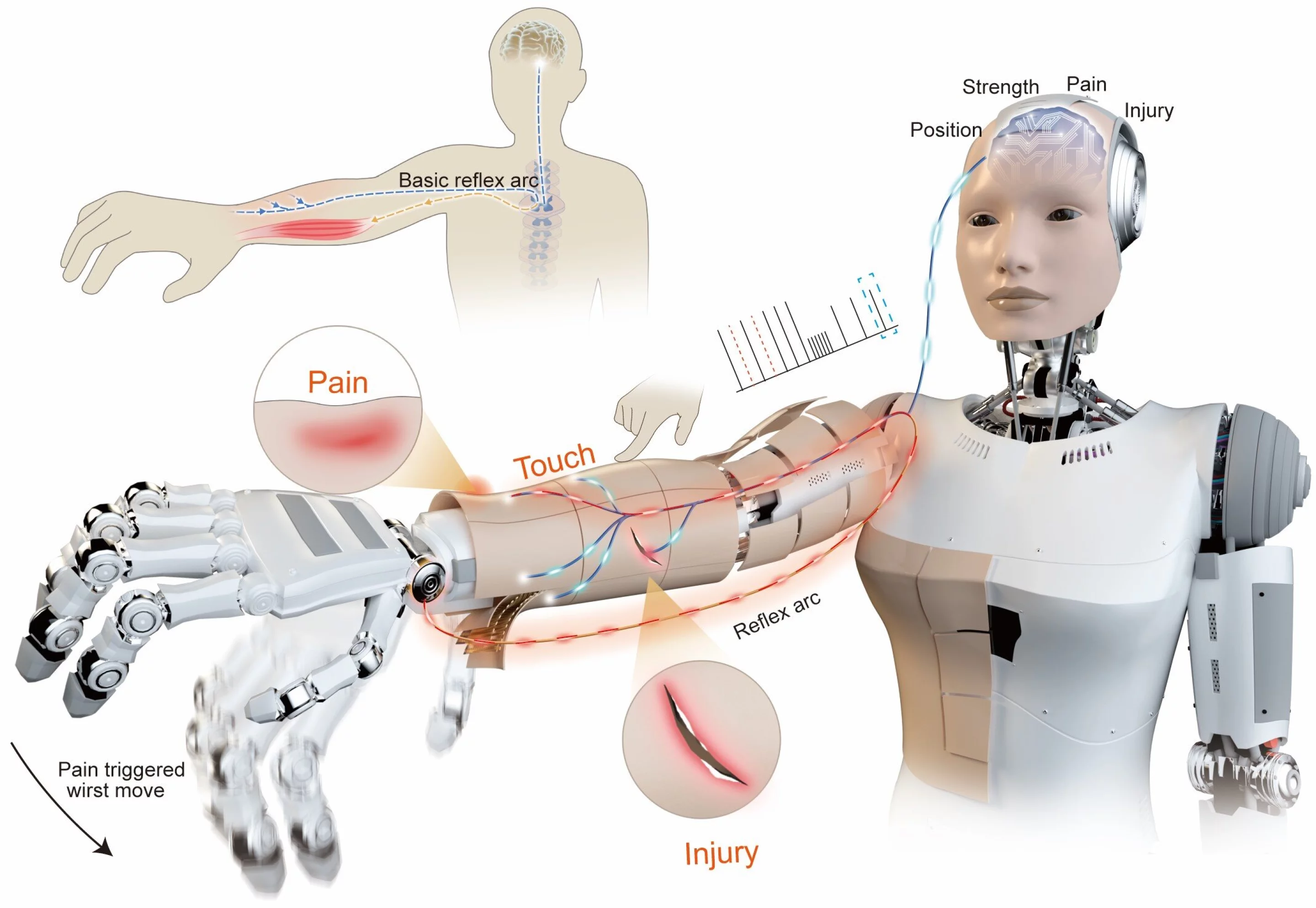
Основой этой электронной системы кожи является сеть гибких датчиков давления, распределенных внутри поверхности. Когда к коже прикасаются, нажимают или ударяют, датчики преобразуют механическую силу в электрические сигналы; в нормальных условиях эти сигналы подаются в центральный процессор робота. Но в этой новой системе, как только восприятие превышает заданный порог, электронная кожа больше не будет загружаться по обычному пути, а будет напрямую посылать сигнал мотору, заставляя привод немедленно выполнять «рефлекторные» действия, такие как уклонение или уменьшение силы.
Уникальность этой системы по сравнению с традиционными решениями заключается в способе кодирования сигнала. Исследовательская группа использовала «нейроморфное кодирование» бионических нейронов, чтобы больше не рассматривать прикосновение как одно значение давления, а переводить силу в быструю последовательность электрических импульсов. Частота и характер импульсов меняются в зависимости от интенсивности и места контакта: когда внешняя сила находится в безопасном диапазоне, форма сигнала соответствует «обычному контакту». Как только давление превышает порог, паттерн претерпевает значительную мутацию, вызывая защитную реакцию.
Исследователи подчеркнули, что система обнаруживает механический стресс, а не эмоции или чувства более высокого уровня. Этот «болевой» механизм является функциональным сигналом — он помогает роботу распознавать вредные внешние силы и реагировать на них, но не означает, что у машины есть эмоции или субъективные переживания.
Автор статьи написал в отчете, что электронная кожа этого типа нейроморфного робота использует иерархическую, нейроноподобную структурную архитектуру для достижения тактильного восприятия с высоким разрешением, активного обнаружения боли и повреждений, а также локального отражения, а также имеет модульные возможности быстрой замены и ремонта, тем самым значительно улучшая тактильные возможности робота, безопасность и более интуитивный опыт взаимодействия человека с компьютером, закладывая основу для «чутких» сервисных роботов.
Чтобы проверить работоспособность системы, исследовательская группа провела различные формы физических испытаний электронной кожи: от легких прикосновений до постепенно увеличивающихся внешних сил, чтобы имитировать потенциально опасные контакты и наблюдать, может ли система точно различать безопасные и опасные состояния в реальном времени. В ходе нескольких раундов экспериментов сенсорная сеть смогла стабильно генерировать различимые шаблоны сигналов и инициировать защитную реакцию разной степени в зависимости от величины внешней силы. Время отклика системы находится на уровне миллисекунд, чего достаточно для поддержки таких действий в реальном времени, как быстрое втягивание силовой части и уменьшение силы захвата. В то же время он по-прежнему может поддерживать стабильный выходной сигнал при нескольких повторяющихся циклах контакта, демонстрируя хорошую долговечность.
Эти улучшения производительности имеют прямое значение для безопасности тесного взаимодействия человека и машины. По мере того, как роботы постепенно переходят из закрытых заводов в повседневную среду обитания человека, такую как дома, больницы и общественные места, тесное взаимодействие в сценариях задач значительно возросло, а также увеличился риск случайных столкновений и даже чрезмерного применения силы. Традиционные меры безопасности в основном полагаются на внешние датчики, заданные границы движения или процедуры аварийного отключения. Хотя эти механизмы эффективны, они часто медленны или негибки. Встраивание прикосновения и «болевого» восприятия непосредственно в «кожу» робота позволяет роботу реагировать на угрозы локально и немедленно.
Ожидается, что эта технология также улучшит производительность при выполнении совместных задач, таких как совместный подъем объектов, мобильных устройств или различных приложений сервисных роботов. Регулируя силу контакта в реальном времени, роботы могут более естественно контролировать силу при удержании хрупких предметов, контакте с телом человека или адаптации к непредсказуемым условиям, снижая риск раздавливания, скольжения или неправильной оценки контакта.
В более широком смысле эта технология также меняет то, как люди воспринимают машины. Робот, который явно может «избегать» и «уменьшать силу» в ответ на внешние силы, даже если у него нет каких-либо эмоциональных переживаний, визуально будет казаться более «отзывчивым» и «больше похожим на живое тело». Подобная обратная связь, вероятно, сделает взаимодействие машины с машиной более интуитивным: точно так же, как люди инстинктивно слегка прикасаются друг к другу, когда другой человек отступает, когда поведение робота «отступления» можно обнаружить, людям будет легче корректировать свои движения, чтобы уменьшить непреднамеренный вред.
Однако эта технология также приводит к более широкой дискуссии о «реализме роботов». Когда роботы научатся стратегиям биологического восприятия с точки зрения безопасности и производительности, возникнут ли они также новые проблемы в этике и дизайне? Некоторые исследователи полагают, что роботам не обязательно нужна «болевая» сигнальная система; другие отмечают, что заимствование биологических механизмов может быть наиболее эффективным способом достижения высокой степени адаптивности и устойчивости. Как найти баланс между функциональными преимуществами и социальными последствиями «сверхантропоморфизма» стало новой задачей — особенно если этот тип кожи подключить к модулю «эмоционального реагирования», управляемому искусственным интеллектом, этот вопрос станет более чувствительным.
В настоящее время эта технология все еще находится на ранних стадиях исследований и еще далека от коммерциализации. Существующие электронные оболочки охватывают лишь ограниченную область. Чтобы получить полную поверхность тела гуманоида, необходимо не только значительно улучшить производственный процесс, но и устранить узкие места в энергопотреблении и обработке данных. Будущая работа будет сосредоточена на расширении зоны покрытия и повышении долговечности. Эти ключевые шаги определят, сможет ли этот новый тип кожи робота перейти от лабораторных прототипов к реальным сценариям применения.
Согласно сообщениям, академические результаты этого исследования были опубликованы в Трудах Национальной академии наук, а соответствующие пресс-релизы были опубликованы TechXplore и другими технологическими СМИ.