Итальянские исследователи недавно разработали мягкую роботизированную руку, вдохновленную осьминогами. Интегрируя распределенное зондирование и управление в «присоске», он обеспечивает локальное «мышление» и автономные возможности захвата, аналогичные щупальцам осьминога. Он предназначен для исследования сложных и непредсказуемых условий морского дна.
Исследование проводилось командой из Лаборатории биомиметической мягкой робототехники Итальянского технологического института (IIT). Они черпали вдохновение из структуры нервной системы осьминога: хотя у осьминога относительно небольшой центральный мозг, около 60% его нейронов распределены между восемью щупальцами. Каждая рука может обрабатывать информацию на месте и запускать рефлекторные действия, например, самостоятельно ловить добычу, не дожидаясь инструкций от мозга. Исследовательская группа пытается воспроизвести эту распределенную архитектуру в роботизированной системе с использованием силикона и электронных компонентов, чтобы восприятие и движение были тесно интегрированы в само гибкое «тело», а не полагались на один центральный процессор.
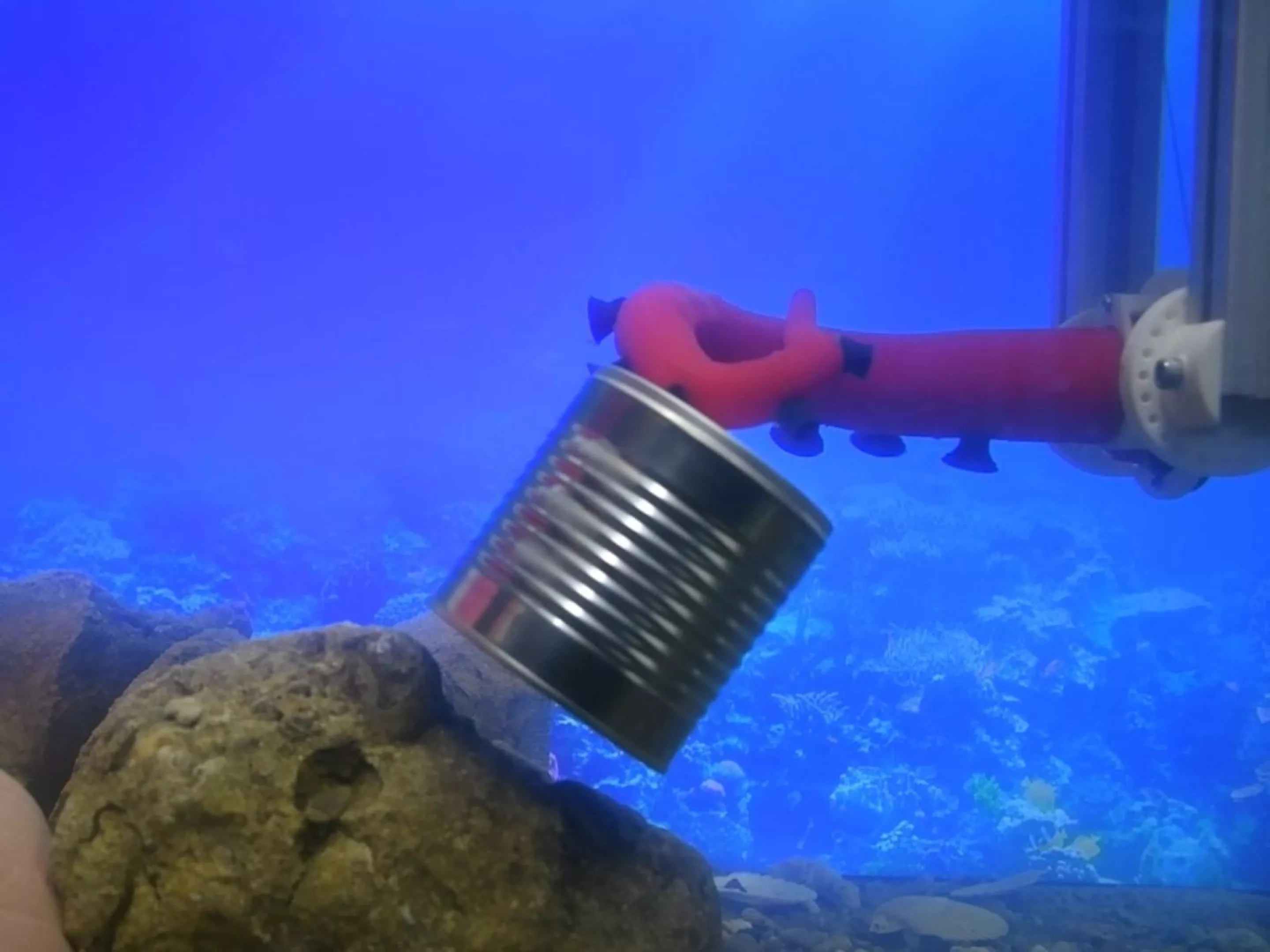
В результате получилась мягкая роботизированная рука длиной около 41 сантиметра и диаметром основания около 4 сантиметров. Его форма и строение похожи на щупальца осьминога. Он оснащен 10 искусственными «присосками» от основания до конца, а размер постепенно уменьшается. Система спроектирована так, чтобы не полагаться на камеры, внешние компьютеры или централизованные блоки управления, а вместо этого децентрализовать все основные возможности восприятия и принятия основных решений в присоске. Результаты исследования были опубликованы в журнале Nature Machine Intelligence, а IIT также выпустил вводные материалы для общественности.
Каждая искусственная присоска объединяет три светоизлучающих диода и три фототранзистора, образуя микрооптическую сенсорную систему, которая используется для измерения изменений в отраженном свете, что эквивалентно локальным нервным узлам этого «механического запястья». Когда посторонний предмет контактирует с поверхностью присоски, силиконовый материал деформируется и соответственно изменяется путь отраженного света. Система определяет, произошел ли контакт, силу контакта и направление падения, тем самым формируя три ключевых сенсорных данных. Испытания показывают, что силовая чувствительность системы составляет около 400 милливольт на Ньютон, а погрешность измерения силы — около 0,1 Ньютона, что примерно эквивалентно весу нескольких скрепок для бумаг; максимальная ошибка распознавания направления составляет менее 18 градусов, а средняя ошибка составляет около 8 градусов, что близко к углу между соседними шкалами часов.
Что касается архитектуры управления, этот мягкий роботизированный манипулятор использует два уровня управления: первый уровень полностью выполняется локально — каждая присоска имеет независимую цепь и запускает адсорбцию сразу после обнаружения контакта, не дожидаясь указаний из центра; второй уровень находится на более высоком уровне и отвечает за получение данных, загружаемых всеми присосками, всесторонний анализ положения цели и характеристик контакта в течение временного окна около 4 секунд и на основе этого принятие решения об общей стратегии захвата, например, позволить роботизированной руке сгибаться вверх или вниз или вращаться, и при необходимости прикрывать автономные действия локальных присосок. Исследовательская группа заявила, что это решение, заключающееся в интеграции датчиков и обработки сигналов непосредственно в присоску, позволяет роботизированной руке реагировать на контакт в режиме реального времени и точно без централизованного управления, а также обладает хорошей масштабируемостью и надежностью и может работать в сложных средах, в том числе под водой.

Все эксперименты в настоящее время проводятся под водой. В ходе испытания эта роботизированная рука смогла обнаружить во время движения такие предметы, как стеклянные бутылки и стаканы, выдала оценку веса схваченного объекта примерно в 72,5 грамма, а реальный вес составил 85 граммов, а также смогла манипулировать целями под разными углами, включая искусственную «морскую звезду». Что касается грузоподъемности, роботизированная рука может поднимать предметы весом до 500 грамм, а ее сенсорные характеристики остаются стабильными после 300 циклов многократного использования, демонстрируя хорошую долговечность. Поскольку каждая присоска отправляет в верхнюю часть управления только уточненную информацию, такую как направление контакта, а не полные необработанные данные, требования к полосе пропускания всей системы значительно снижаются, поэтому ее можно легко расширить за счет большего количества присосок или даже нескольких контактных запястий без значительного ущерба для скорости отклика.
Исследовательская группа отметила, что конструкция имеет сильные модульные характеристики, а количество и расположение присосок можно гибко регулировать в соответствии с различными задачами. Потенциальные сценарии применения включают проверку подводной инфраструктуры, такой как подводные трубопроводы, кабели и платформы, а также сбор биологических образцов на узких или сложных участках, куда не могут добраться жесткие роботы. Ожидается, что благодаря своей гибкой структуре и возможностям автономного принятия решений эта роботизированная рука, похожая на осьминога, откроет новые технологические пути в таких областях, как глубоководные исследования, океаническая инженерия и подводное обслуживание.
Осьминоги уже давно стали важным источником вдохновения для бионических разработок в области робототехники. Еще в 2017 году немецкая компания по автоматизации Festo продемонстрировала OctopusGripper на Ганноверской выставке. Это силиконовый захват для запястья, приводимый в движение сжатым воздухом. Он использует два ряда присосок, чтобы обернуть цель и завершить захват, когда она надута, но он по-прежнему в значительной степени полагается на внешний контроль давления воздуха и ручные манипуляции. В последние годы исследователи из Бристольского университета в Великобритании подошли к ситуации с другого измерения, уже не копируя форму щупалец, а изучая слизь, выделяемую присоской осьминога. Они разработали новый тип присоски, состоящий из многослойной мягкой структуры и бионической жидкостной системы. Он может имитировать то, как слизь осьминога запечатывает щели на шероховатых изогнутых поверхностях, чтобы захватывать предметы неправильной формы, такие как камни и дерево, которые трудно прочно прикрепить к традиционным присоскам.
Сделав еще один шаг вперед, исследовательские группы из Пекинского университета, Национального университета Сингапура, Чжэцзянского университета, Пекинского технологического института и других учреждений совместно разработали механическую систему захвата OUT-Robot для моделирования стратегии захвата головоногих моллюсков, позволяющую ему быстро переключаться между мягким и жестким состояниями для сортировки и захвата объектов различной формы, разной гибкости и разного веса. По сравнению с предыдущими попытками, самой большой особенностью новой конструкции IIT является «автономность»: он может не только сканировать, но и решать, как сканировать. Исследователи также подчеркнули, что геометрия объектов, выбранных в текущем эксперименте, относительно проста. Следующий шаг включает в себя тестирование с более сложными и разнообразными формами и весами, а также попытку внедрить нейроморфные вычисления, подобные мозгу, чтобы приблизить всю систему к нейронным цепям настоящих осьминогов с точки зрения обработки информации.