Исследовательская группа из Вюрцбургского университета в Германии недавно разработала фотонный наноробот, диаметр которого составляет примерно одну пятидесятую диаметра человеческого волоса. Он может точно отслеживать, захватывать, транспортировать и выпускать бактерии в жидкой микроскопической среде, предоставляя людям новый технологический путь для прямого контроля над микробным миром.
Отчеты показывают, что микророботы этого типа предназначены для микромасштабных операций, в которые практически невозможно эффективно вмешаться традиционными средствами. Для биологических материалов, таких как отдельные клетки и бактерии в жидкой среде, достижение высокоточного контроля всегда было серьезной проблемой научных исследований, и этот новый результат показывает, что такие задачи, как сбор и перемещение бактерий, теперь осуществимы.
Исследовательскую группу возглавил Берт Хехт, профессор Вюрцбургского университета Юлиуса-Максимилиана в Германии. Основное решение, предложенное командой, состоит в том, чтобы использовать слабую отдачу, возникающую при испускании одного фотона, для управления движением устройства микронного масштаба, называемого «микродроном».
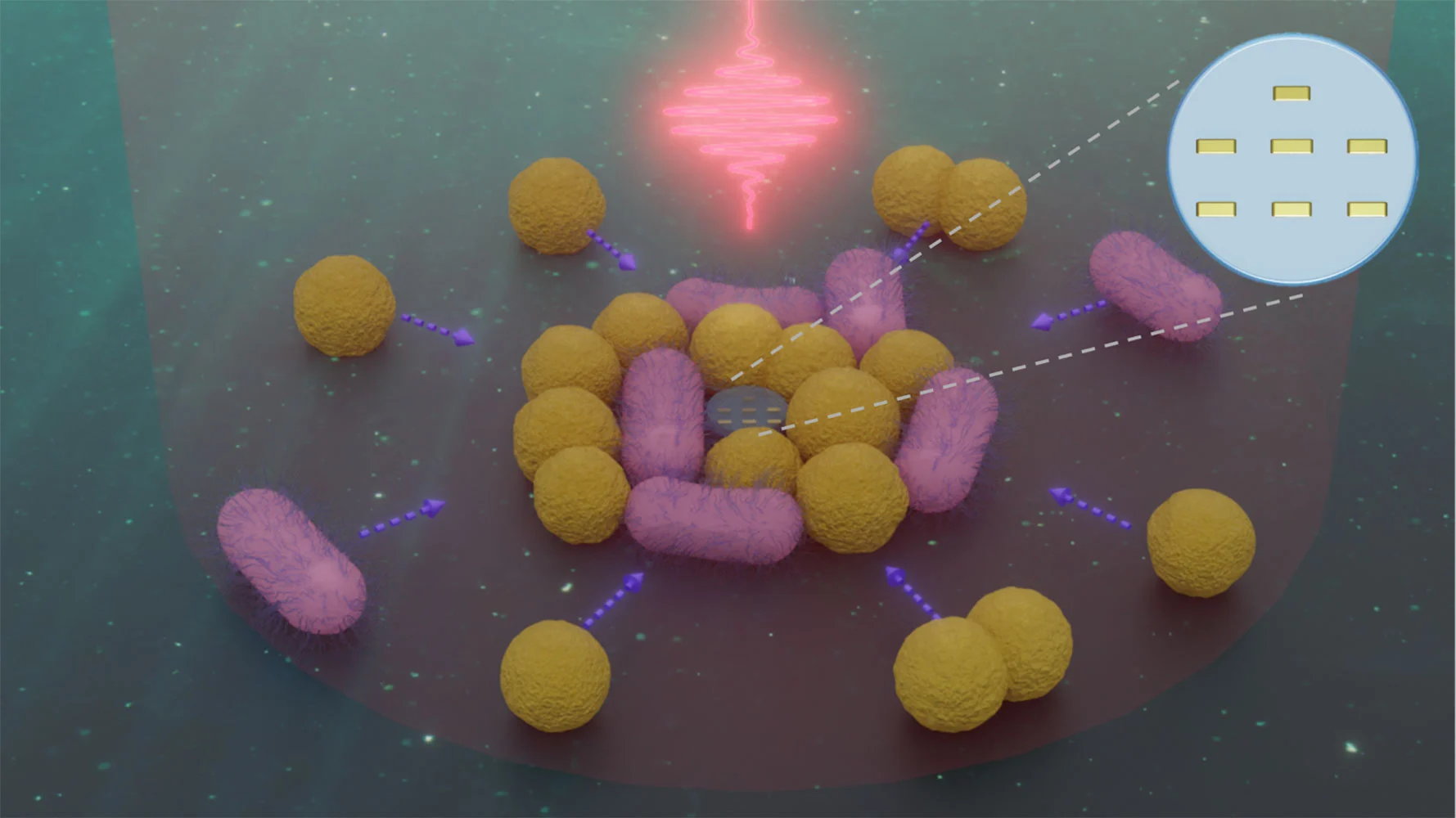
По имеющимся данным, внутри этих устройств можно интегрировать до четырех плазмонных наноантенн. Они сначала поглощают свет с определенными свойствами, а затем направленно повторно излучают фотоны; каждый выстрел будет вызывать чрезвычайно малую силу отдачи, которая в принципе аналогична силе отдачи пули после выхода из ствола. Поскольку масса самого микроробота чрезвычайно мала, даже если эта сила очень слаба, ее все равно достаточно для обеспечения высокой скорости и быстрого ускорения.
В последних исследованиях исследователи еще больше уменьшили размер этого типа робота с легким приводом до менее 1 микрона и упростили метод его управления, но при этом сохранили механизм движения, основанный на фотонной отдаче.
Команда воспользовалась тем фактом, что антенные провода внутри робота естественным образом совпадают с направлением поляризации падающего света. Регулируя состояние поляризации света, исследователи могут контролировать направление робота, а его поступательный импульс по-прежнему исходит от отдачи фотонов, что делает его метод управления ближе к режиму макроскопической транспортировки «рулевое управление плюс движение».
Цзинь Цинь, первый ученый-экспериментатор, участвовавший в работе, сказал, что, по сути, команда создала наноробота, управляемого светом, который может захватывать и собирать бактерии. Благодаря упрощенной конструкции размер робота был уменьшен до масштаба, позволяющего непосредственно участвовать в микробной деятельности, в некотором смысле это похоже на «микроскопическое очищающее устройство».
Исследователи заявили, что этот тип наноробота обладает высокой маневренностью и может быстро совершать повороты на 90 градусов, что позволяет проводить систематическое и эффективное сканирование на большой площади образца. В то же время он может избирательно захватывать, транспортировать и высвобождать значительное количество бактерий.
Это означает, что в контролируемой экспериментальной среде устройство этого типа должно выполнять операцию «очистки» микроокружения — концентрировано собирать бактерии и перемещать их в заранее определенное место.
Берт Хехт отметил, что это достижение наглядно демонстрирует, что свет можно использовать не только для наблюдения за микроскопическим миром, но и для его активного формирования. Хотя концепция «микророботов-уборщиков» звучит футуристично, соответствующие физические принципы теперь проверены экспериментально.
Даже перенося более крупные скопления бактерий, нанороботы сохраняют полную подвижность, хотя скорость их передвижения немного снижается. Исследовательская группа считает, что эта стабильность еще больше подчеркивает потенциал его применения в таких областях, как микробиология, биомедицинские исследования и сверхмалый точный контроль.
Соответствующий исследовательский документ называется «Наноразмерный робот-пылесос», подписанный Цзинь Цинь, Карстеном Бюхнером, У Сяофеем и Бертом Хехтом, и был опубликован 27 марта 2026 года.