Даже если самый совершенный в мире микровоздушный аппарат для насекомых (MAV) будет построен, от него в конечном итоге будет мало пользы, если он не сможет стабильно приземлиться. Вот почему ученые из Гарвардского университета спроектировали своего RoboBee с парой длинных комариных ног с суставами.
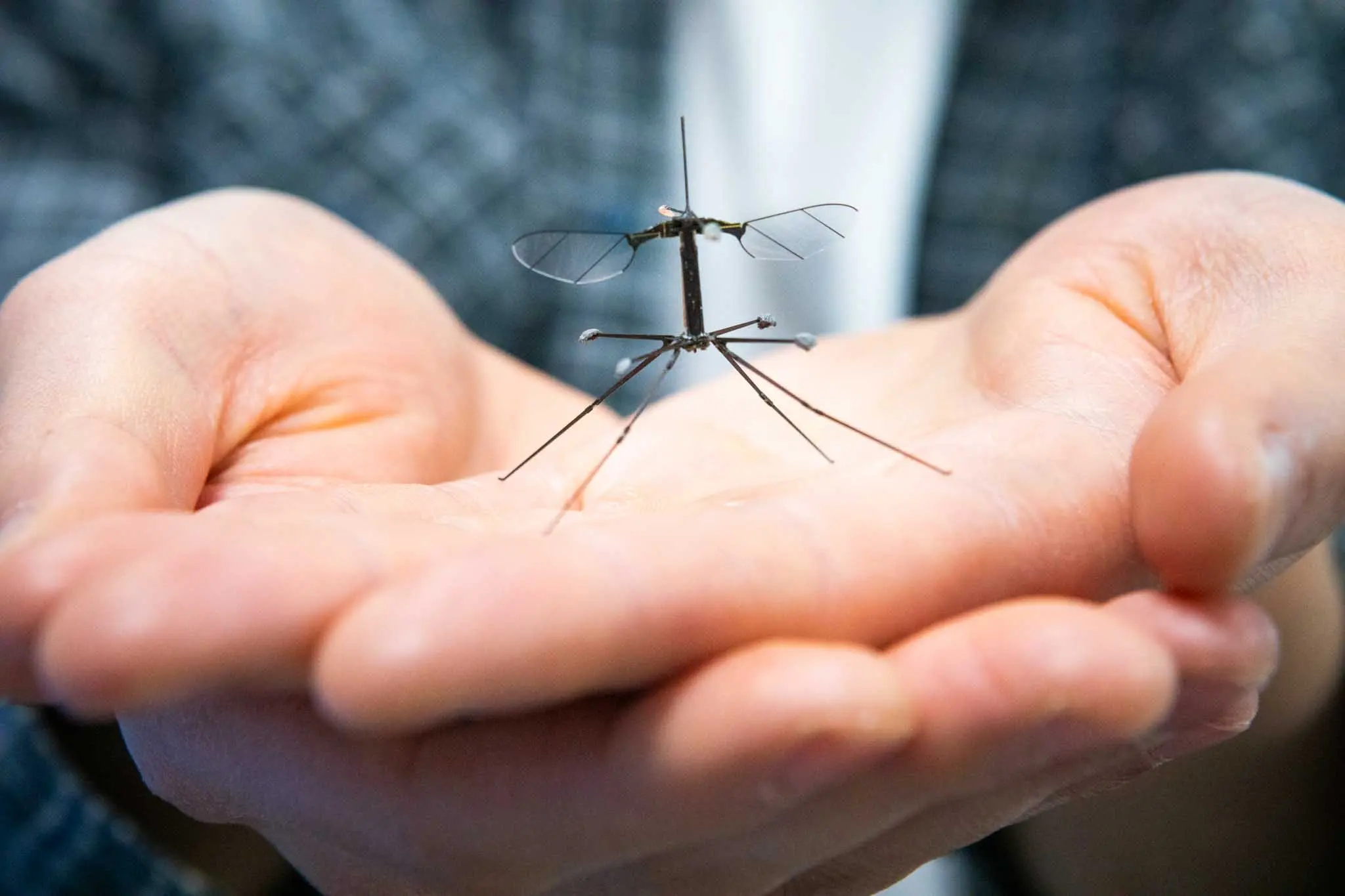
У RoboBee есть ноги, имитирующие комаров. Будущие версии можно будет использовать в поисково-спасательных операциях или для опыления сельскохозяйственных культур.
Для тех, кто не знаком с RoboBee, это робот, вдохновленный пчелами, который летает, взмахивая парой крошечных крыльев, оснащенных искусственными мышцами. Он имеет размах крыльев менее 3 сантиметров (1,2 дюйма) и весит всего одну десятую грамма... хотя он подключен к источнику питания и микропроцессору посредством проводов. При этом будущие версии могут в конечном итоге работать полностью независимо. На самом деле уже существует солнечная версия.
В то время как другие версии маленького робота доказали свою способность к маневрам, таким как подводный полет и висячая остановка, базовая модель никогда не демонстрировала хорошие результаты приземления на плоские (или другие) поверхности. Это связано с тем, что вихри, создаваемые его взмахами крыльев, могут вызвать турбулентность воздуха, когда он удерживается землей, в результате чего робот теряет равновесие.
«Раньше, если мы приземлялись, мы останавливали транспортное средство немного дальше от земли, позволяли ему упасть и молились, чтобы оно приземлилось вертикально и безопасно», — сказал Кристиан Чан, аспирант инженерного факультета, который возглавляет механическую модернизацию робота.

Комары известны своей способностью мягко приземляться.
Четыре новые ноги RoboBee, вдохновленные ногами комара, достаточно длинные и гибкие, чтобы они могли безопасно коснуться земли до того, как тело робота подвергнется воздействию турбулентности, вызванной эффектом земли.
Кроме того, новые алгоритмы управления помогают роботу приземляться более плавно, а не позволять ему «просто падать».

Многократная экспозиция RoboBee, взлетающей с одного листа и приземляющейся на другой, используя новые ноги.
«Нахождение биологического вдохновения среди широкого разнообразия насекомых дает нам бесчисленные способы продолжать совершенствовать роботов», — сказала Алисса Эрнандес, постдокторант и соавтор исследовательской работы. «В свою очередь, мы можем использовать эти роботизированные платформы в качестве инструментов для биологических исследований, проводя исследования, проверяющие биомеханические гипотезы».
Статья была недавно опубликована в журнале Science Robotics. На видео ниже вы можете увидеть, как RoboBee имитирует приземление журавля.
Источник: Гарвардская школа инженерии и прикладных наук имени Джона А. Полсона.