Вместо трудоемкой и трудоемкой задачи по проектированию и созданию крошечных роботов с нуля, некоторые ученые превращают существующих насекомых в роботов с дистанционным управлением. Может помочь новая «сборочная линия», которая сможет превращать тараканов в роботов гораздо быстрее, чем вручную.
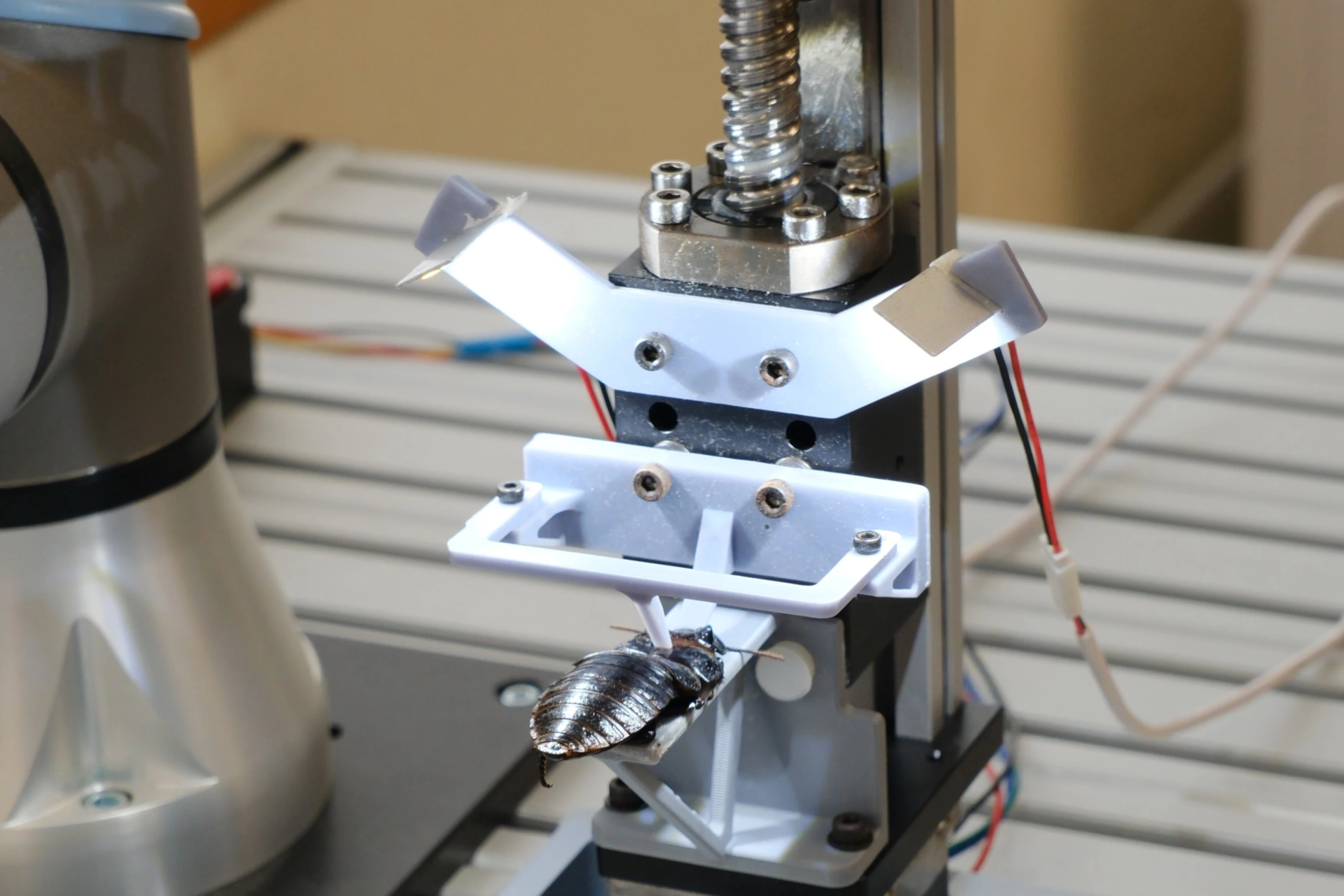
Таракан под наркозом ждет свой электронный рюкзак на конвейере
Проще говоря, роботизированное насекомое обычно состоит из более крупного насекомого (обычно мадагаскарского голосового таракана), оснащенного небольшим электронным рюкзаком. Электроды с дистанционным управлением в рюкзаке стимулируют части тела насекомого, такие как усики или глаза, заставляя его начинать и останавливать ходьбу, а также поворачивать влево или вправо.
Конечно, все это возникло не просто из болезненного любопытства. Одним из основных применений таких роботов является поиск выживших, оказавшихся под завалами на местах стихийных бедствий. Оснащенный камерой с дистанционным управлением, робот-таракан может протискиваться через непроходимые в противном случае щели в завалах и передавать живые изображения и координаты любых выживших, с которыми он сталкивается.
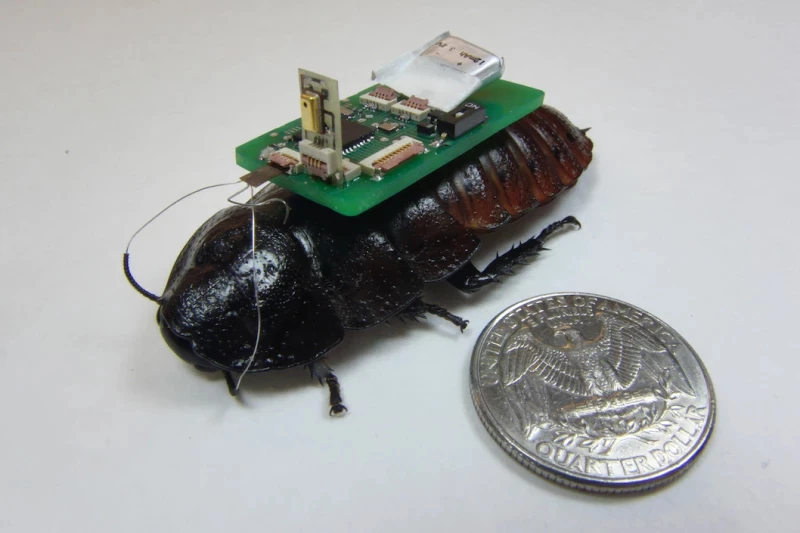
Робот-таракан, разработанный Университетом штата Северная Каролина
Однако для столь масштабной задачи всего лишь нескольких роботов-тараканов недостаточно.
Предполагается, что стаи насекомых будут собираться в руинах, возможно, даже координируя свои маршруты поиска посредством беспроводной связи между рюкзаками. Например, если пути двух роботов пересекаются, их рюкзаки могут увести их друг от друга.
Чтобы эта технология стала осуществимой, тараканов невозможно тщательно сконструировать вручную... их необходимо быстро производить с помощью автоматизированных процессов. Вот тут-то и приходит на помощь сборочная линия.
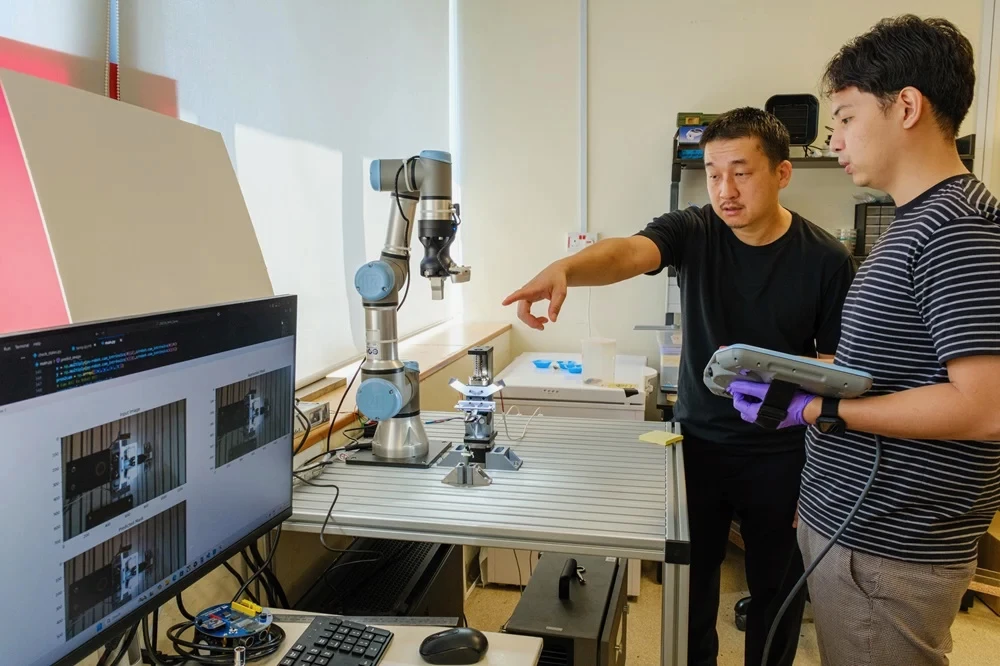
Разработка сборочной линии (на фото) прошла при поддержке Японского агентства науки и технологий.
Система с компьютерным управлением, разработанная профессором Хиротакой Сато и его коллегами из Наньянского технологического университета в Сингапуре, состоит из платформы для удержания насекомого, камеры Intel RealSense для определения глубины и роботизированной руки UR3e с роботизированным захватом Hand-E.
Как только анестезированный таракан прикрепляется к платформе, двигатель перемещает устройство на место, а система компьютерного зрения оценивает размер и положение таракана. Затем часть внешней кутикулы таракана оттягивается, обнажая мембрану между переднеспинкой и среднегрудными сегментами.
Затем предварительно собранный 2,3-граммовый рюкзак был помещен в тело таракана, а два биполярных электрода в передней части рюкзака были имплантированы в левую и правую стороны обнаженной брюшины таракана. Затем осторожно прижмите основной рюкзак к средней части грудной клетки таракана до щелчка. В качестве последнего шага выдвиньте платформу, чтобы освободить все еще находящегося под наркозом таракана.
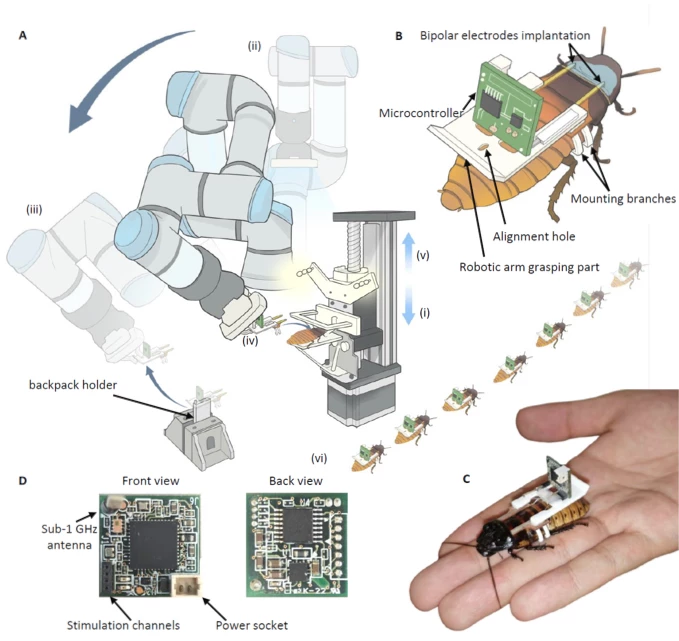
Схема сборочной линии и робот-таракан: собранные вручную роботы были испытаны в полевых условиях после землетрясения магнитудой 7,7, произошедшего в Мьянме
Весь процесс занял 68 секунд на одного таракана, тогда как выполнение той же задачи вручную заняло бы от 15 минут до часа. В ходе испытаний на тараканах сборочной линии и роботизированных тараканах, собранных вручную, обе группы показали одинаковые результаты при выполнении задач с дистанционным управлением, таких как ходьба по S-образной дорожке и исследование препятствий.
Эта конкретная роботизированная установка имеет дополнительное преимущество: она использует только 40% времени стимуляции и 75% напряжения стимуляции аналогичных систем для насекомых (и ранцевых батарей). Более того, рюкзак можно отстегивать между миссиями.
«Наши инновации делают мечту об использовании большого количества роботов-насекомых в реальных условиях более реалистичной», — сказал Сато. «Автоматизируя процесс, мы можем быстро и непрерывно производить роботов-гибридов насекомых. Это позволит нам производить их в больших масштабах, что имеет решающее значение для срочных операций, таких как поиск и спасение после стихийных бедствий».
Статья об исследовании была недавно опубликована в журнале Nature Communications.